CCT™ Drive System
THE MOTORINO CCT DRIVING SYSTEM
Introduced in 2008 after two years of intensive research and development and now standard on all MOTORINO™ XP-series scooters, the MOTORINO™ CCT™ (Continuous Current Transmission) drive system makes our 500W electric scooters competitive with the torque and hill-climbing ability of 50CC gasoline motor scooters. The CCT™ system can outperform any regular brushless or geared motor of up to 50% higher rated consumption and offers over 60% more starting torque than a conventional 500W BLDC (“Brush-Less DC”, as three-phase AC motor with DC-AC inverter-controller systems are most commonly referred to) motor and controller system.
One would expect this extra torque production to require a higher input wattage, but as you will read, this is not the case with the CCT™ system; the higher torque is achieved by more efficiently using the same amount of power. The added performance-via-efficiency is especially welcome since more than 500W total continuous power would disqualify a scooter from the “power-assisted bicycle” legal class.
The major innovation of the CCT™ system is that the controller tailors its power output according to the loading it can sense from the motor and the rider’s selection of drive mode. The method of doing so is complex but in short it is accomplished by modifying the wave-shapes of the AC power fed to the three windings of the specially constructed MOTORINO™ CCT™ motor.
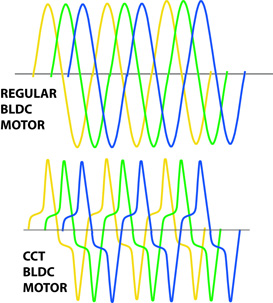
In a conventional BLDC system, the rise and fall of power pulses is sinusoidal. (Pic.1) When an incline, increased speed, or wind resistance put more load on the motor the power consumption increases sharply and the motor efficiency drops, usually drastically, to as low as 20% as it approaches stall speed. This loss of efficiency is because power is being turned into heat instead of torque for much of the sine-wave cycle. In addition to being wasteful, this excess current can overheat controllers and motors, even to the point of demagnetizing the motors’ rare-earth magnets. These high peak-current conditions can also shorten battery life.
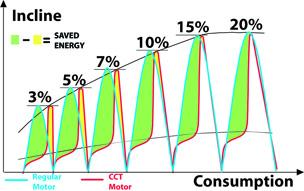
The CCT™ controller employs PWM (Pulse Width Modulation) to shape the output waveforms in unique ways. It creates asymmetrical waves of varying “duty cycle” to continuously and perfectly match the motor’s demands. By dynamically modulating the width, peak, and rise of the power waveform, it can provide just the right amount of power at the right time. Especially, the CCT™ system reduces detrimental induction interference around the zero-crossing point.(Pic2) Reduced back-EMF interference and sharper, well timed power peaks save up to 58% of total energy, which depending on riding conditions can be used to boost the torque, increase the speed or simply save it for greater range. This more efficient power delivery naturally reduces losses through heat generation.
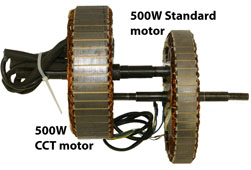
In addition to clever pulse width modulation in the controller, the MOTORINO™ CCT™ motor makes better use of that power because of the special winding configuration and larger stator core. When driven by the CCT™ controller, the stator’s magnetic flux density reaches much higher levels compared to a standard BLDC motor. This higher magnetic flux, reacting against more powerful neodymium magnets that are wider and thicker than those found in conventional motors, results is increased torque for a given amount of power input, more current collected during regenerative braking, and less susceptibility to demagnetization under extreme conditions.
THE CCT GEARS
As previously stated, the power saved by the CCT™ system can be put to use in three different ways: high torque (T), high speed (S), and economy mode or high range (R). The rider can select one of the three corresponding “electronic gears” at any time and without releasing the throttle by means of a switch below the right hand grip.

When a steep incline slows the bike, the rider can select the high torque gear. This setting broadens the pulses; energizing the stator for longer periods to lessen the RPM drop between steps. The controller continuously monitors motor load and RPM to determine the maximum achievable speed, and modulates the pulses accordingly. Note that this does not increase the overall power drawn by the motor; it remains continuous (hence continuous current transmission) - whereas a conventional motor will always try to reach its maximum speed by drawing more power. In high torque mode the CCT™ power train can deliver enough torque to move a total weight of 330Lb up a 24% incline!
On flat ground and shallow inclines the rider will want to use the high-speed gear. In this setting the processor narrows the pulse curve, increasing its peak. This higher peak increases the motive power allowing the bike to reach higher speeds - again without increasing the current consumption as we are simply using power saved by the delayed rise. The high speed gear allows a bike and rider of a combined 450lbs to summit a hill up to 11% gradient without any perceptible loss of speed. If the high speed gear is used on steeper hills the rider may feel more pull initially, but the speed will drop off more quickly than it would in high torque mode.
Maximum range is achieved by using the economy mode whenever possible. The CCT™ system still modulates the waveforms according to motor loading, but does not apply the saved power in the vertical (higher peaks) or horizontal (broader pulses) directions. It simply decreases the overall load on the battery. The power peaks are just as high as they would be on a conventional BLDC, with the same motive power, but we end up with power savings up to 50% depending on motor load. There will be a drop in speed and torque compared to the other two gears, however, the economy mode is best used on flat ground when maximum range is the priority. Riding in economy mode can extend range up to 20km.
REGENERATIVE BRAKING
While almost all BLDC motor systems can do some regenerative braking, the larger magnets and unique windings of the CCT™ drive system make the energy recovery process much more effective. The stopping power is so great that in careful riding the mechanical brakes are made almost redundant, only really being necessary as the motor RPM approaches zero. This not only extends the scooters’ range by returning more energy to the battery, but greatly reduces wear on brake pads and rotors.
CONCLUSIONS
Greenwit Technologies’ CCT™ controller and motor comprise a completely unique system. All components (stator winding and laminated electromagnets, larger rotor permanent magnets, controller logic and commutation table, and robust connecting wires) were designed in Canada and are not found on any other brand of e-scooter. The vastly improved torque and efficiency are compelling benefits, but perhaps the most impressive aspect of the system is its reliability; completely solid state with no brushes or other mechanical contacts in the motor, the spinning rotor/wheel rim and the sealed ball bearings are the only moving parts. The motor and controller are well-sealed against the elements and will likely never require servicing in normal use.
BEWARE OF IMITATORS
Perhaps imitation really is the sincerest form of flattery…. We have noticed that many competitors have started offering “gear switches”, seemingly in an attempt to mimic our highly-successful CCT™ drive system. In our testing, however, we’ve found that these so-called “gears” simply set different levels of maximum current and do not modify the waveforms to the motor. Any increases in torque come at the expense of higher input power (and possibly legality), depleting the batteries faster while likely increasing the risk of overheating their typically-undersized motors and controllers.
The CCT™ drive system is ONLY available on the MOTORINO™ XP-series scooter models and a high-power version is also featured on the GTx LS motorcycle.